


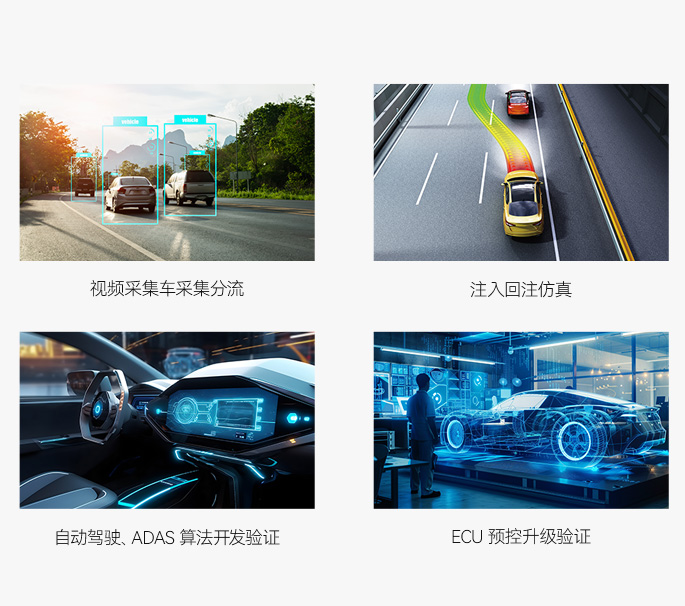

VSA100 能够抓取分析 GMSL 视频流数据,能够自动获取并分析 ECU 对 GMSL 摄像头的配置信息,并且快速验证抓取的数据信息是否能够正常用于注入、采集和分流,降低注入、采集和分流等设备的对接难度,提高对接效率,加快汽车自动驾驶、ADAS 的开发、算法验证和 HIL 仿真测试进程
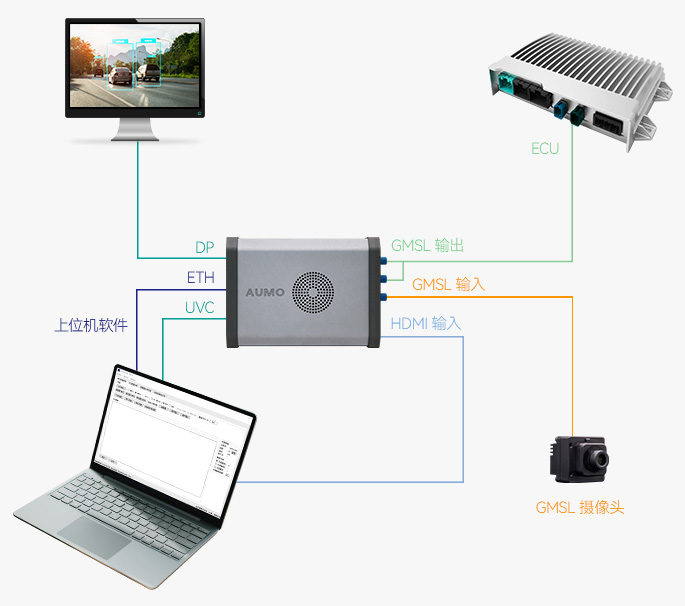
车辆域控制器和摄像头之间串入VSA100,上位机软件通过以太网获取信息并自动解析,获得ECU对摄像头的配置信息以及摄像头 GMSL 数据 (包括视频图像格式、分辨率、帧率、嵌入行信息、时序等)
1. 配置 VSA100 的 DP、UVC 接口输出视频,用于采集配置及验证
2. 配置 VSA100 透传 GMSL 数据,用于注入分流配置及验证
3. 配置 VSA100 以 HDMI 为输入源的单路注入,且可以通过透传外接摄像头的 IIC 数据和嵌入行数据快速实现仿真注入验证
4. 自动获取信息完成分流配置

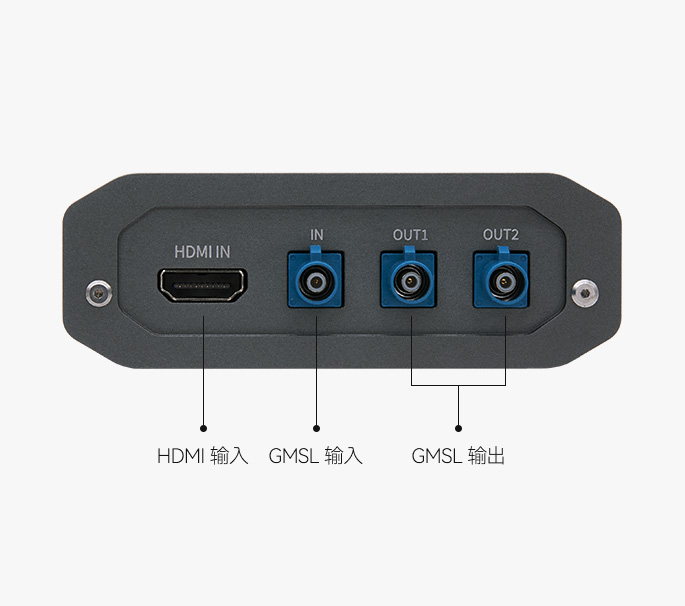
· 1 路 GMSL 输入接口,用于抓取 GMSL 摄像头数据和采集配置验证
· 2 路 GMSL 输出接口,用于获取 ECU 对摄像头的配置信息和注入分流配置验证
· 1 路 HDMI 输入接口,用于注入视频源输入,验证注入配置效果

· 1 路 mini DP 输出接口,用于摄像头视频图像预览,验证采集配置效果
· 1 路 RJ45 千兆以太网网口,用于与上位机交互
· 1 路 UVC Type-C 接口,于摄像头视频图像预览,验证采集配置效果
· 1 路 12V Type-C接口,用于 12V DC 输入

串行器
可模拟 MAX9295A / MAX96717F / MAX96717 等
解串器
MAX9296A
GMSL 输入
1 路,支持 4096×2160@30fps 视频,YUV422、RAW12 格式
GMSL 输出
2 路,支持 4096×2160@30fps 视频,YUV422、RAW12 格式
DP 输出
1 路,支持 4096×2160@30fps 视频输出,RGB888
HDMI 输入
1 路,支持 4096×2160@30fps 视频输入,RGB888
UVC
1 路,支持 4096×2160@30fps 视频
FAKRA
Amphenal Z code Fakra
线缆长度
GMSL1 模式下可达 40 米(3Gbps)
GMSL2 模式下可达 20 米(6Gbps)
外部触发
支持外部触发同步
网络
千兆以太网口,用于与上位机软件系统交互
升级
支持 OTA 固件升级
供电
Type-C 12V 供电
工作温度
-40℃ ~ 70℃
工作湿度
0~90%
上位机软件支持系统
Linux 内核版本:UBuntu18-linux5.4.0-144、UBuntu20-linux5.15.0-67
Windows 版本:Windows10、Windows11
功能支持
1.一键获取并解析 ECU 对摄像头的配置信息以及摄像头输出的图像格式和时序
2.快速验证捕获到的信息是否能够正常用于 AUMO 产品线的 注入卡和采集卡
3.自动获取信息完成分流配置
4.OTA 固件升级
静态功耗
10
不接入摄像头模组
动态功耗
12
接入 1 个摄像头模组

VSA100 的应用显著提升了自动驾驶及ADAS硬件仿真测试中的设备对接效率,其快速抓取和配置验证功能,使得摄像头、 ECU、采集及分流注入设备之间的参数匹配变得更加精准、快捷。测试工程师能够将更多精力投入到场景测试和系统优化上
VSA100 出色的实时性和多场景适配能力,为 ECU 性能评估提供了快捷可靠的支持,减少了开发成本,加快了自动驾驶技术从验证到量产的进程
.jpg "GMSL-视频流分析仪-摄像头、ECU-数据抓取分析-注入采集配置验证-(1).jpg")
.jpg "GMSL-视频流分析仪-摄像头、ECU-数据抓取分析-注入采集配置验证-(4).jpg")
.jpg "GMSL-视频流分析仪-摄像头、ECU-数据抓取分析-注入采集配置验证-(3).jpg")
.jpg "GMSL-视频流分析仪-摄像头、ECU-数据抓取分析-注入采集配置验证-(2).jpg")